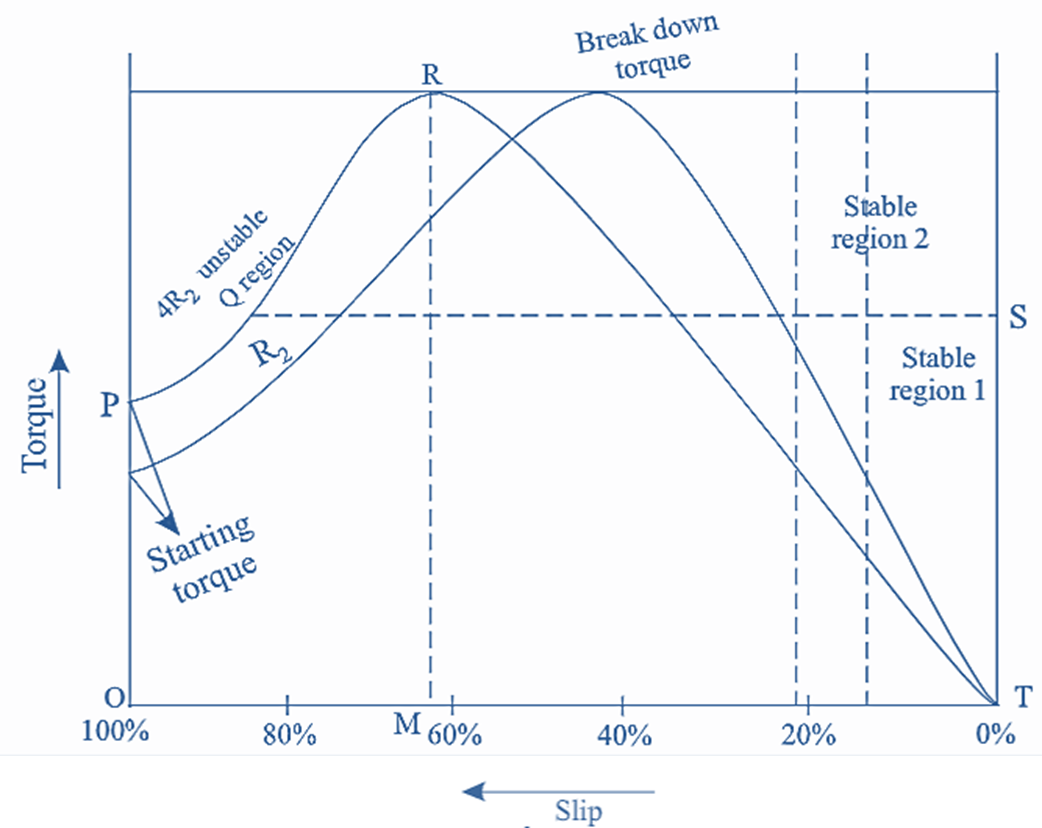
Figure 1: Torque-slip characteristics of an induction motor.
The torque-slip characteristics (see Figure 1) of an induction motor, is the curve drawn using the equation relating torque and slip is given as,
\[T=\frac{K\varphi s{{E}_{2}}{{R}_{2}}}{R_{2}^{2}+{{(s{{X}_{2}})}^{2}}}\]
Case (i): No-load Condition
When there is no load on the induction motor, the actual speed of the rotor is equal to zero, i.e.,
\[s=\frac{{{N}_{s}}-0}{{{N}_{s}}}=\frac{{{N}_{s}}}{{{N}_{s}}}=1\]
Therefore at no-load condition, slip is maximum this is the staffing condition and the torque at s = 1 is called as the starting torque.
Case (ii): Increasing Load Condition
As the load is increased, slip decreases, but it has got a significant value. Hence at this condition R2 is negligible when compared to sX2. Torque is inversely proportional to slip,
\[T\propto \frac{1}{s}\]
Therefore the torque continues to increase.
Case (iii): Maximum Torque Condition
As the load is increased, the torque continues to increase. Now if the load is increased in such a way that s = R2/X2 then the torque reaches a point called as maximum torque or breakdown torque or stalling torque.
Case (iv): Further Increasing the Load
If the load is further increased after reaching the maximum torque condition, slip reduces to low values and the torque (T) is directly proportional to slip (s) i.e., the torque also staffs decreasing. The torque-slip continues to decrease till they become zero.
The graph shows the different regions of operation, they are,
- PQ, the unstable region
- ST, the stable region
- OP, the staffing point.
In the stable region, the torque varies linearly with slip i.e., it is the region between the points s = 0 and s = Tmax. In the unstable region, the load torque decreases as the slip is increased. This is the region after the maximum torque occurs. OP represents the starting torque i.e., the torque at s = 1. If the load torque is less than OP, the matrix will accelerate till the torque developed by the motor is equal to load torque.
MR is the maximum value of torque called as break down torque. The maximum value of torque occurs at a slip value of s = R2 / X2. From the load torque characteristics, it can be seen that motor with different values of R2 will have different regions of operation i.e., as the value of R2 is increased, the slip at which maximum torque occurs increases, which in turn increases the stable regions of operation. Hence in order to improve the operating regions of induction motor the higher values of R2 must be considered.