
Figure 1: Torque-speed characteristics of an induction motor.
The torque developed in the 3-ϕ induction motor depends on its speed. The relationship between torque and speed can be represented by the curve as shown in figure (1), which represents the speed-torque characteristics. The starting torque is called the locked rotor torque while the maximum torque is called the breakdown torque. Under full-load conditions, the motor runs at a speed of ‘N’. When the mechanical load increases, the speed of the motor keeps decreasing until the torque becomes equal to load torque. When the two torques are balanced, the motor runs at a constant speed. But, if the torque exceeds maximum torque or breakdown torque then the motor stops abruptly.
Effect of Rotor Circuit Resistance on Torque Speed Characteristics of Induction Motor
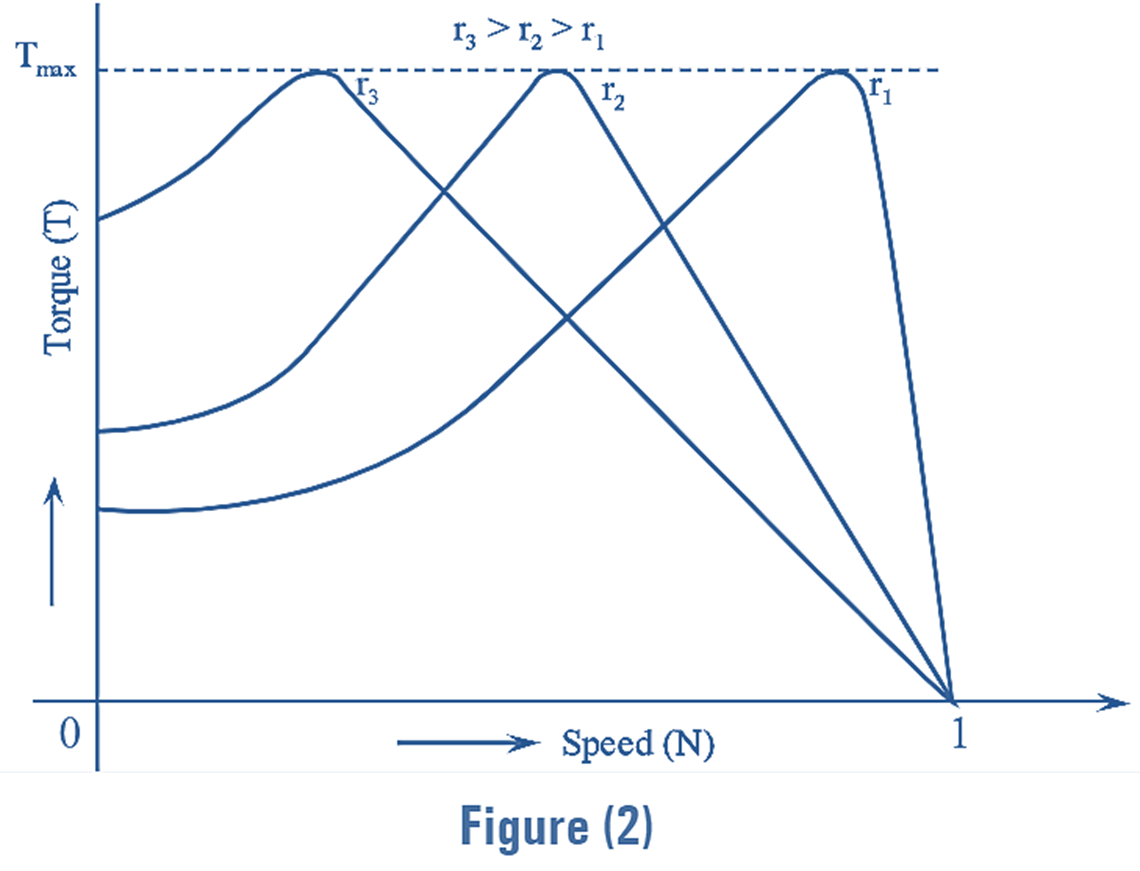
The speed of an induction motor can be controlled by adding resistances in the rotor circuit. The torque-speed characteristics of an induction motor are modified due to a variation in the rotor resistance as shown in figure (2). These characteristics show that the speed of the motor decreases with an increase of resistance value in the rotor circuit. Thus, this method controls speed from rated speed to lower speed and smoother speed control can be achieved by increasing external resistance in steps.
Effect of Rotor Circuit Reactance on Torque Speed Characteristics of Induction Motor
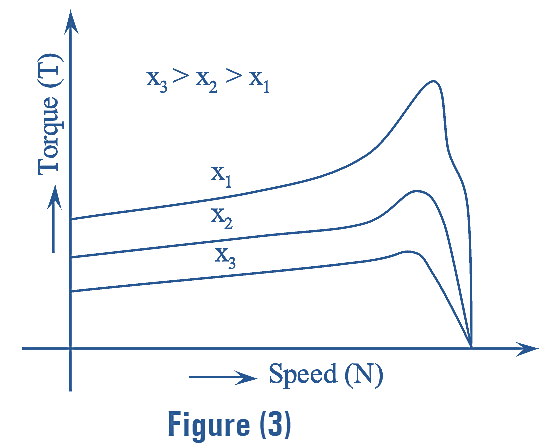
The torque of a 3-ϕ induction motor can be controlled by changing stator reactance or rotor reactance or both. Stator reactance can be varied for both squirrel cage and wound rotor motor, but the rotor reactance can be varied only for a wound rotor motor by placing an external reactor in the rotor circuit through slip rings. The torque-speed characteristics of an induction motor with changing equivalent reactance are shown in figure (3). These characteristics show that the speed can be controlled from rated speed to lower speed in downward direction. The range of speed control in this method is limited. The number of steps of external reactors determine the smoothness of the speed control which is stepped. Stepless and smooth reactance variation can be achieved by using saturable reactors.