If the voltage applied to the induction motor contains harmonics, then the harmonic fluxes are developed in the gap due to the magnetics of the motor. These harmonic fluxes induce e.m.f and circulate harmonic currents in the rotor windings. The harmonic currents interact with the harmonic fields and develop an additional harmonic torque. A common problem is with the seventh harmonic where it creates a forward rotating torque field at one seventh of synchronous speed. There will be a maximum torque just below 1/7th synchronous speed (Ns) and if this is high enough, the net torque produced can be higher than the torque produced due to fundamental frequency where at \(\frac{1}{7}{{N}_{s}}\), the slip is high. This makes the motor to crawl adjust below \(\frac{1}{7}{{N}_{s}}\).
Phenomenon of Crawling of an Induction Motor
A.C winding of the stator produces complex flux wave consisting of a fundamental wave and odd harmonics. Fundamental wave revolves at synchronous speed i.e., Ns and the odd harmonics like 3rd, 5th, 7th etc., rotate at a speed of Ns/n i.e., Ns/3, Ns/5 and Ns/7 respectively. The motor torque will hence consists of fundamental and harmonic torques. As in a balanced three phase system third harmonic currents are absent, rotating field is not produced and hence torque is not produced.
Therefore, now the motor torque comprises of only three components, namely fundamental torque (at a speed of Ns), 5th harmonic torque (at a speed of Ns/5), 7th harmonic torque (at a speed of Ns/7).
The revolving field that is set-up by the 5th harmonic currents rotates in the reverse direction at a speed of Ns/5 (since phase difference of 5th harmonic currents = 5 × 120º = 600 = – 120º). Whereas, the rotor is rotating in the forward direction at a slip greater than 100%. Hence the reverse torque of the 5th harmonic producing a braking action is very small and can be ignored.
The rotating field that is set up by the 7th harmonic cur- rents, rotates in the forward direction at speed of Ns/ 7 (since phase difference of 7th harmonic currents = 7 × 120º = 2 × 360 + 120 = 120º).
Neglecting all higher order harmonics, the resultant motor torque can be considered as the sum of fundamental and 7th harmonic torques.
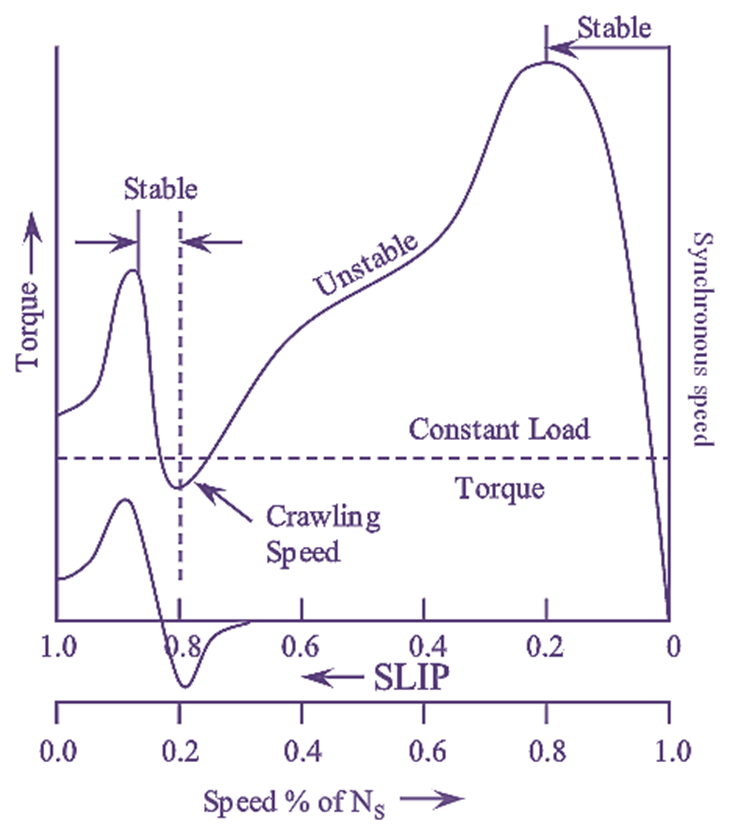
Figure shows the resultant speed torque characteristics due to fundamental and 7th harmonic. The torque developed by the motor may descend below the load torque. In case if the load torque is kept constant by some mechanical load on the shaft, the motor speed will not accelerate above 1/7th of the normal speed i.e., the motor crawls.
In the figure, the magnitude of the 7th harmonic torque is maximum at a speed near to 1/7th of synchronous speed. It is also observe that there is a dip in the curve showing the stable running region, where the running speed corresponding to the 7th harmonic is less than the synchronous speed and the torque produced is called harmonic induction torque.
Cogging in Induction Motor
When an induction motor refuses to start even if full voltage is applied to it, this is called as cogging. This happens when the rotor slots and stator slots are same in number. If they are integer multiples of each other then variation of reluctance as a function of space will have pronounced effect producing strong forces than the accelerating torque. Due to this, the opposite poles of stator and rotor come in front of each other and get locked.
Methods of reducing the effect of Crawling and Cogging in an Induction Motor.
The effect of crawling and cogging can be reduced by skewing the rotor bars in squirrel-cage type motors. By proper choice of coil pitch and distribution of coils while designing the winding, the possibility of presence of harmonics in the air gap flux wave is either made zero or reduced to a very low value to eliminate the crawling effect. To avoid cogging, the number of stator and rotor slots are never made to be equal or have an integral ratio.